
- Verpackung - Logistik - Handhabung
- Handhabungssystem und Hebetechnik
- Pneumatikgreifer
- Hangzhou FOUK Mechanical Technology Co., Ltd.
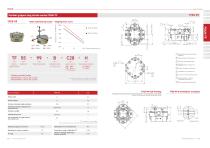
Pneumatikgreifer TF55-99parallel4 BackenIndustrieroboter

Zu meinen Favoriten hinzufügen
Zum Produktvergleich hinzufügen
Eigenschaften
- Betätigung
- pneumatisch
- Typ
- parallel
- Anzahl Greifer
- 4 Backen
- Produkttyp
- Industrieroboter
- Eigenschaften und Optionen
- 4 Finger
- Greifkraft
186 N, 200 N
- Hub
8 mm
(0,315 in)
Beschreibung
Konfigurationsoptionen:
B: Belüftung an der Unterseite
C28: Länge der Schubstange
H: Hohe Temperaturbeständigkeit
Der pneumatische Vier-Finger-Zentriergreifer mit der T-förmigen Tragstruktur nimmt verschiedene Druckplatten auf. Seine Abschreckfeder hat eine Lebensdauer von mehr als 500.000 Mal. Die Greifkraft des Vier-Finger-Greifers ist gleichmäßig, wodurch Objekte stabil gegriffen und Schäden verhindert werden können.
---
Kataloge
TF55-99
1 Seiten
Weitere Produkte von Hangzhou FOUK Mechanical Technology Co., Ltd.
Pneumatic Grippers
































Verwandte Suchbegriffe
- Pneumatischer Sauggreifer
- Paralleler Sauggreifer
- Sauggreifer / 2 Backen
- Industrieroboter-Sauggreifer
- Sauggreifer / 3 Backen
- Winkel-Sauggreifer
- Zentrischer Sauggreifer
- Leichtgewichtiger Sauggreifer
- Sauggreifer mit großem Hub
- Greifzange / 4 Backen
- Sauggreifer / 2 Finger
- Greifzange / 3 Finger
- Hydraulische Greifzange
- Greifzange / 4 Finger
- Greifmodul
- Flexible Greifzange
- Wasserdichte Greifzange
- Industrie-Greifzange
- Pneumatisches Greifmodul
- Greifmodul für kollaborative Roboter
* Die Preise verstehen sich ohne MwSt., Versandkosten und Zollgebühren. Eventuelle Zusatzkosten für Installation oder Inbetriebnahme sind nicht enthalten. Es handelt sich um unverbindliche Preisangaben, die je nach Land, Kurs der Rohstoffe und Wechselkurs schwanken können.